MiR250はよりフレキシブルなAMR
小型でパワフル
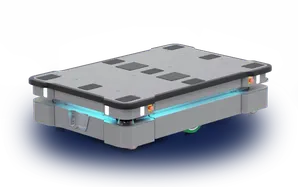
MiR250の設置面積はわずか580 x 800 mmで、高さはわずか30cmです。その大きさにもかかわらず、最大250kgまで楽に扱うことができ、毎秒2mで移動することができる。この俊敏性は、市場にある他のすべてのAMRと一線を画し、要求の厳しい環境への適応性を非常に高めている。
コンパクトな設計のおかげで、80センチという狭いスペースも通り抜けることができる。そのため、他の移動ロボットでは困難なドアやエレベーターも、MiR250なら楽々です。
MiR250はメンテナンスが容易で、24時間稼働するように設計されています。さらに、最新の安全基準に準拠しているため、市場で最も安全なAMRであると確信しています。

完全なソリューション
しかし、必要なのはAMRプラットフォームだけではありません。MiRは、ロボットの幅広いアドオンを提供し、お客様の購入決定とロジスティクスソリューションの統合を可能な限り容易にする追加サービスも提供しています。

投資のリターンを見つける
AMRで製造オペレーションを強化してください。コストを削減し、サプライチェーンを合理化し、安全性を向上させ、ダウンタイムを最小限に抑え、魅力的な職場を作り、市場の要求に迅速に対応してください。
ロボットを選択してROIを計算する:

MiR250
250kg payload
MiR600
600kg payload
MiR1350
1350kg payload